Ball-Balancing Platform
This project focused on the design and integration of a servo-actuated balancing platform intended to keep a ball centered through active control. The system combined mechanical design in SolidWorks with a Raspberry Pi Pico, two servos, and real-time control logic. The final result demonstrates the completed platform and its ability to balance the ball through sensor feedback and coordinated servo motion.
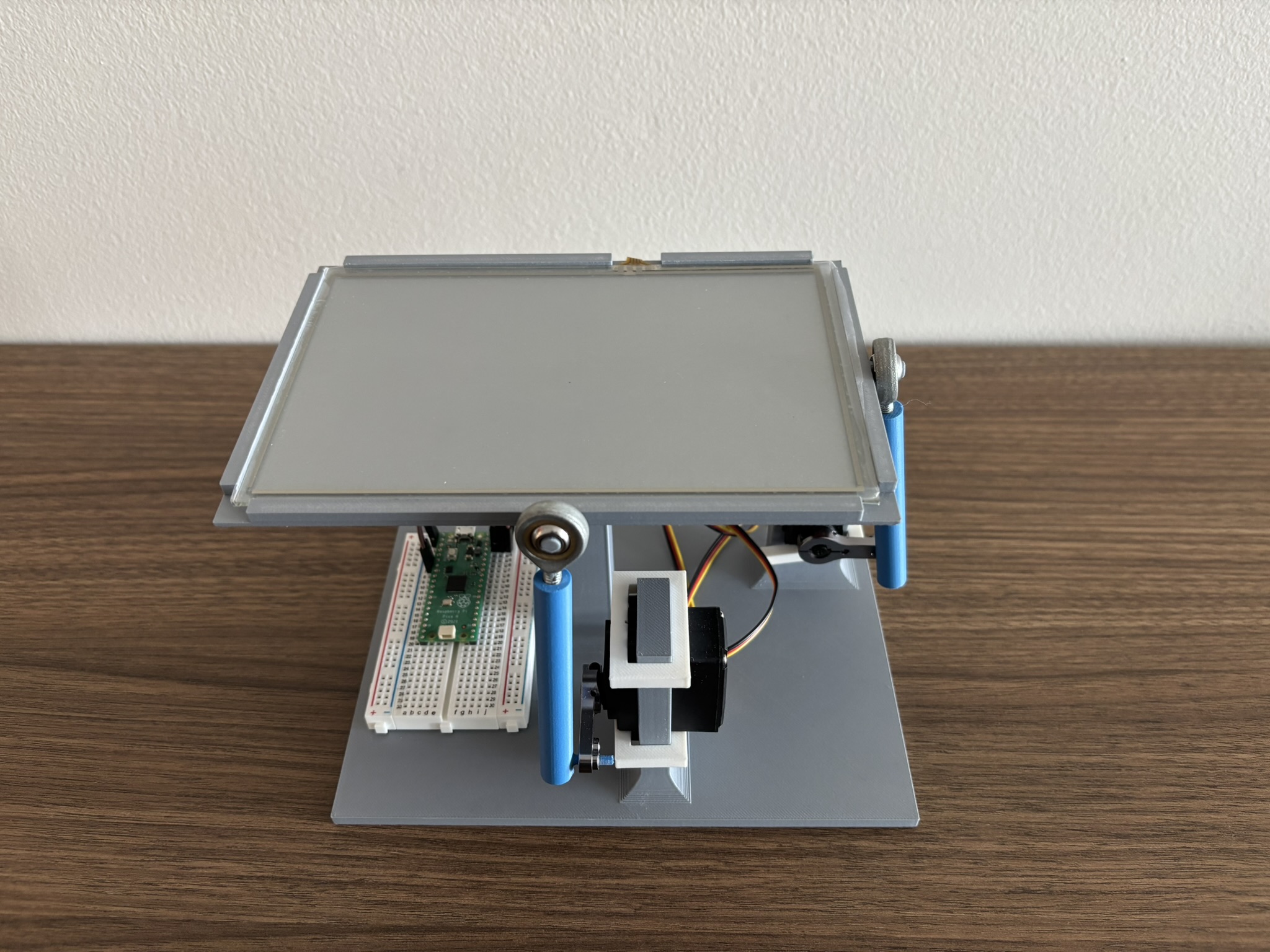
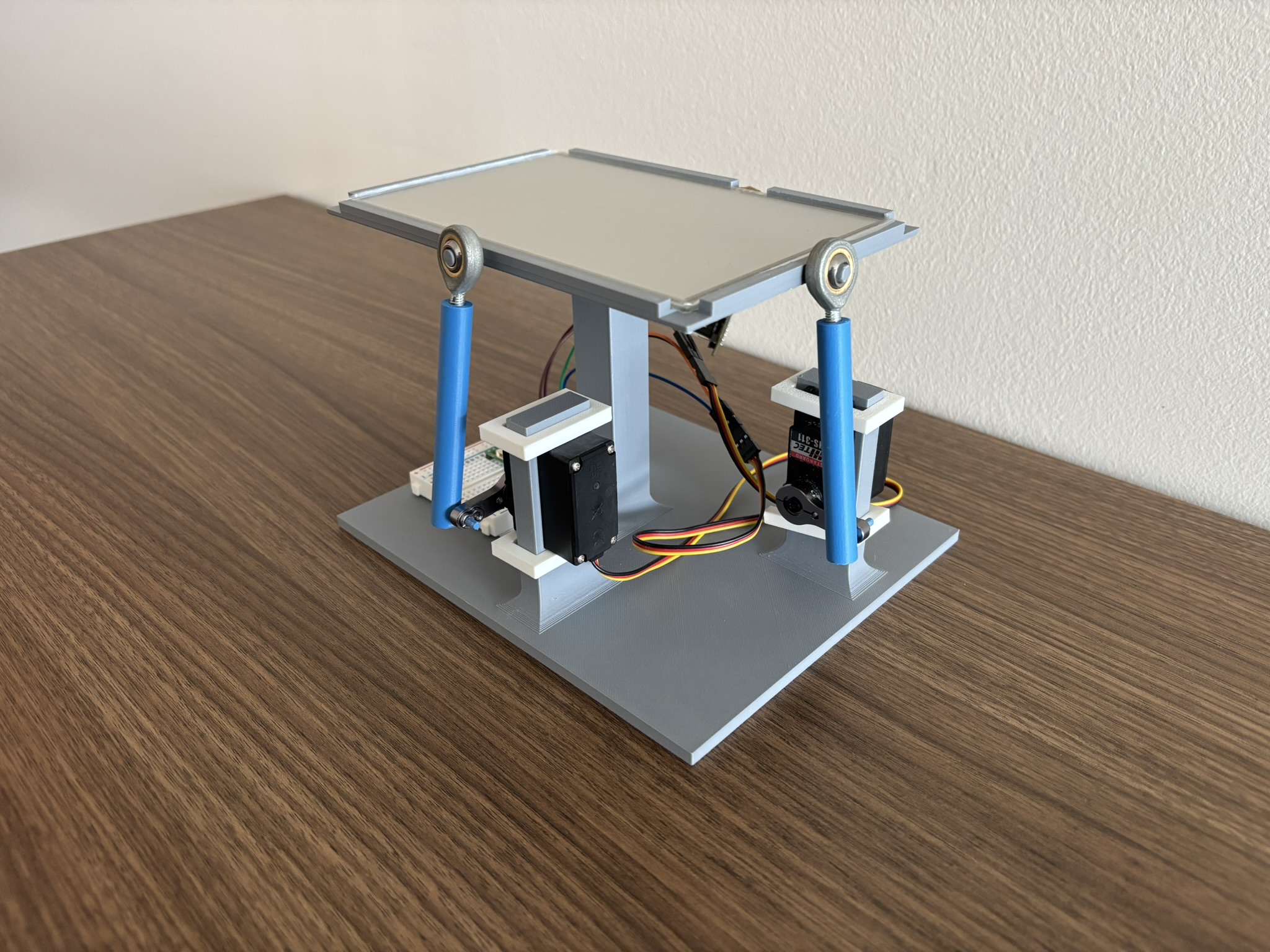
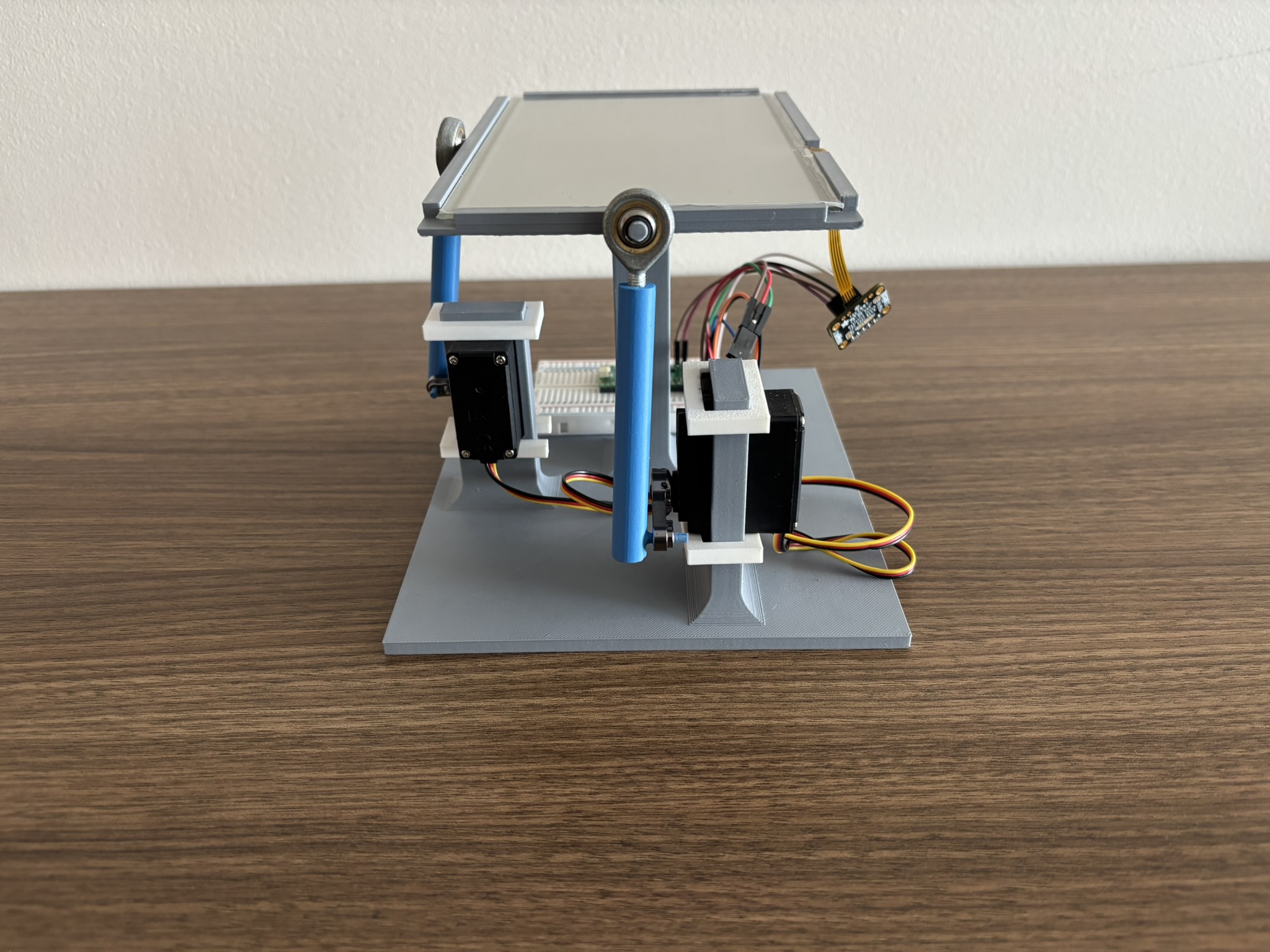
1. Final Build
The completed platform was designed to actively adjust its orientation using two servos in order to keep the ball balanced near the center of the plate. This project combined mechanical design, hardware integration, and control implementation into a working electromechanical system. The final build highlights the physical platform layout, servo arrangement, and overall system assembly.
2. Final Performance
The videos below show the completed balancing platform in operation. In these demonstrations, the system responds to the ball’s movement by adjusting the platform angle in real time, showing the final performance of the integrated mechanical design, electronics, and control logic.
2. Final Performance
The videos below show the completed balancing platform in operation. In these demonstrations, the system responds to the ball’s movement by adjusting the platform angle in real time, showing the final performance of the integrated mechanical design, electronics, and control logic.
2. Final Performance
The videos below show the completed balancing platform in operation. In these demonstrations, the system responds to the ball’s movement by adjusting the platform angle in real time, showing the final performance of the integrated mechanical design, electronics, and control logic.
3. Key Takeaways
This project strengthened my experience in mechatronics, SolidWorks design, and hardware troubleshooting. It also reinforced the importance of integration, since the final system depended not only on the mechanical structure, but also on the wiring, servo response, and real-time control behavior working together correctly.